二维运动:速度、速率、轨迹与加速度
电子游戏如何预测抛射物的落点,NASA 又如何规划卫星轨道?其核心在于用参数方程分别追踪 \(x\) 和 \(y\) 坐标随时间的变化。本课介绍如何由位置函数求出物体的速率与运动方向,如何确定轨迹的几何形状,以及如何判断物体处于加速还是减速状态。
理解物体如何在空间中运动是物理学和工程学的基础。以下是二维运动在现实世界中的应用:
- 电子游戏与动画:每个角色、抛射物和摄像机路径都由参数方程描述,将位置表示为时间的函数
- 太空探索:NASA 正是使用这些方程来绘制卫星轨道(它们是椭圆)并计算何时点燃推进器
- 运动科学:追踪足球的弧线路径或跑道上的跑步者需要将速度分解为分量
- 机器人技术:自动驾驶汽车必须分别知道它们的速率(大小)和方向(速度向量)才能安全导航
- 天气预报:飓风和风场用二维和三维的速度场来描述,气象学家需要知道风暴何时在加速
本课将讨论如何用向量描述运动,消去时间参数以确定轨迹形状,以及判断物体何时在加速或减速。
本课内容
- 位置向量 \(\vec{r}(t) = (x(t),\, y(t),\, z(t))\) 及其时间演化
- 速度向量 \(\vec{v}(t) = \frac{d\vec{r}}{dt} = (\dot{x},\, \dot{y},\, \dot{z})\)
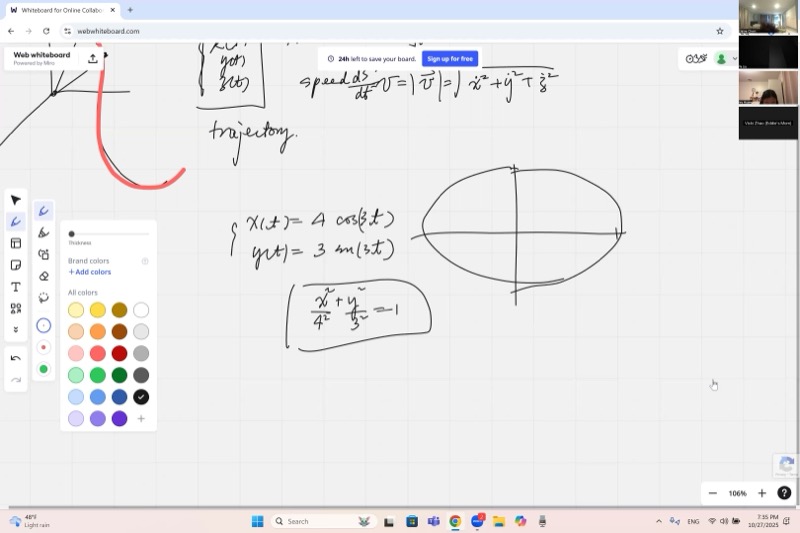
- 速率是速度的大小:\(v = |\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2 + \dot{z}^2}\)
- 消去参数 \(t\) 以求轨迹方程
- 利用勾股恒等式从参数方程中识别椭圆轨道
- 确定轨迹上的起点和运动方向
- 加速与减速:\(a(t) \cdot v(t) > 0\) 与 \(a(t) \cdot v(t) < 0\)
- 无需计算复杂导数的速率图形分析
- 一维运动中的转折点:\(v(t) = 0\) 且速度变号的位置
课程视频
课程关键帧
预备知识
向量是一个同时具有大小(模)和方向的量。我们用箭头表示向量:\(\vec{v}\)。
在二维中,向量有两个分量:\(\vec{v} = (v_x,\, v_y)\)。在三维中,它有三个分量:\(\vec{v} = (v_x,\, v_y,\, v_z)\)。
向量的模(长度)使用勾股定理:
\[|\vec{v}| = \sqrt{v_x^2 + v_y^2} \quad \text{(二维)} \qquad |\vec{v}| = \sqrt{v_x^2 + v_y^2 + v_z^2} \quad \text{(三维)}\]
例如,如果 \(\vec{v} = (3, 4)\),那么 \(|\vec{v}| = \sqrt{9 + 16} = 5\)。
参数方程通过将每个坐标表示为一个参数(通常是时间 \(t\))的独立函数来描述曲线:
\[x = f(t), \qquad y = g(t)\]
不是直接将 \(y\) 写成 \(x\) 的函数,而是让 \(x\) 和 \(y\) 都依赖于 \(t\)。当 \(t\) 变化时,点 \((x, y)\) 描绘出一条称为轨迹的曲线。
例如,\(x = \cos t\),\(y = \sin t\) 当 \(t\) 从 \(0\) 到 \(2\pi\) 时描绘出一个单位圆。
最重要的三角恒等式是:
\[\cos^2\theta + \sin^2\theta = 1\]
这直接来自单位圆:任意点 \((\cos\theta, \sin\theta)\) 都在圆 \(x^2 + y^2 = 1\) 上。
我们经常使用这个恒等式来从含有正弦和余弦的参数方程中消去参数 \(t\)。
椭圆是一个被拉伸的圆。它的标准方程为:
\[\frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\]
其中 \(a\) 是半长轴(宽度的一半),\(b\) 是半短轴(高度的一半),或反之。当 \(a = b\) 时,椭圆就变成了一个圆。
椭圆的参数形式为 \(x = a\cos\theta\),\(y = b\sin\theta\)。
核心概念
二维和三维中的位置、速度与速率
一个在空间中运动的物体有一个随时间变化的位置向量:
\[\vec{r}(t) = \big(x(t),\; y(t),\; z(t)\big)\]
速度向量是位置对时间的导数:
\[\vec{v}(t) = \frac{d\vec{r}}{dt} = \big(\dot{x}(t),\; \dot{y}(t),\; \dot{z}(t)\big)\]
这里的点记号 \(\dot{x}\) 表示 \(\frac{dx}{dt}\)。速度告诉我们运动的快慢和方向。它是一个向量——指向轨迹的切线方向。
速率是速度的大小——它只告诉我们运动的快慢,没有方向:
\[v = |\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2 + \dot{z}^2}\]
速率也可以写成 \(\frac{ds}{dt}\),其中 \(ds\) 是沿轨迹的无穷小弧长。
消去参数:求轨迹
给定参数方程,我们通常希望得到轨迹——空间中的曲线,不涉及时间。我们通过消去 \(t\) 来实现。
示例:假设 \(x(t) = 4\cos(3t)\),\(y(t) = 3\sin(3t)\)。
第 1 步——分离三角函数:
\[\frac{x}{4} = \cos(3t), \qquad \frac{y}{3} = \sin(3t)\]
第 2 步——应用勾股恒等式 \(\cos^2\theta + \sin^2\theta = 1\):
\[\left(\frac{x}{4}\right)^2 + \left(\frac{y}{3}\right)^2 = \cos^2(3t) + \sin^2(3t) = 1\]
通过使用勾股恒等式 \(\cos^2\theta + \sin^2\theta = 1\),可以从参数方程中消去时间,揭示路径的几何形状。此处,参数化的圆/椭圆方程组合成一个简洁的方程。
\[\boxed{\frac{x^2}{16} + \frac{y^2}{9} = 1}\]
这是一个椭圆,半长轴 \(a = 4\)(沿 \(x\) 方向),半短轴 \(b = 3\)(沿 \(y\) 方向)。
探索——观察椭圆轨迹随时间的描绘过程:
拖动 \(t_{\max}\) 的滑块来观察质点描绘椭圆的过程。它从 \((4, 0)\) 开始,沿逆时针方向运动。
动画演示:带速度向量的二维轨迹
Particle Tracing an Elliptical Path with Velocity Arrow
起点和运动方向
轨迹方程 \(\frac{x^2}{16} + \frac{y^2}{9} = 1\) 告诉我们形状,但不能告诉我们运动从哪里开始或沿哪个方向。要恢复这些信息,我们需要回到参数方程。
起点:代入 \(t = 0\):
\[x(0) = 4\cos(0) = 4, \qquad y(0) = 3\sin(0) = 0\]
所以运动从 \((4, 0)\) 开始,即椭圆的最右端。
方向:对于一个很小的正 \(t\),\(\cos(3t)\) 从 1 略微减小,而 \(\sin(3t)\) 从 0 增大。所以 \(x\) 减小,\(y\) 增大——质点向左上方移动,即逆时针方向。
计算椭圆的速度和速率
对 \(x(t) = 4\cos(3t)\) 和 \(y(t) = 3\sin(3t)\) 求导:
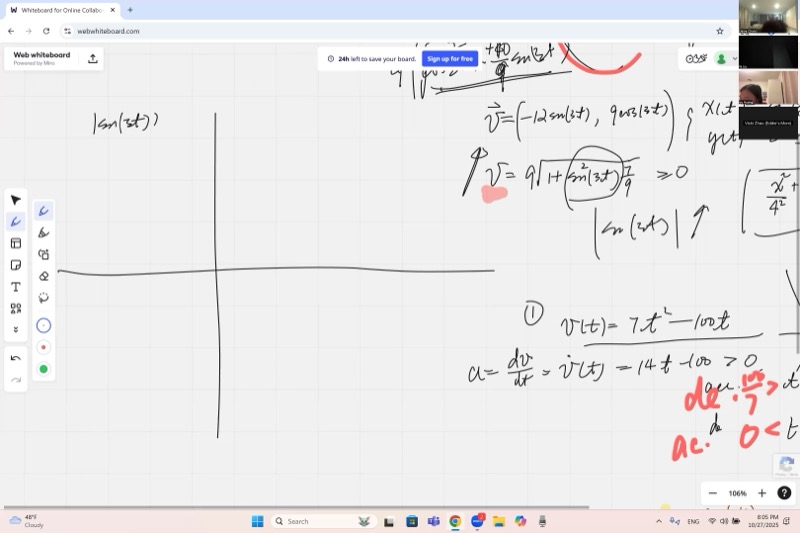
\[\vec{v}(t) = \big(-12\sin(3t),\;\; 9\cos(3t)\big)\]
速率为:
\[v = \sqrt{(-12\sin 3t)^2 + (9\cos 3t)^2} = \sqrt{144\sin^2(3t) + 81\cos^2(3t)}\]
我们将 \(144 = 81 + 63\) 拆分来简化:
\[v = \sqrt{81\sin^2(3t) + 63\sin^2(3t) + 81\cos^2(3t)}\]
\[= \sqrt{81\underbrace{(\sin^2 3t + \cos^2 3t)}_{= 1} + 63\sin^2(3t)}\]
\[\boxed{v(t) = \sqrt{81 + 63\sin^2(3t)}}\]
由于 \(\sin^2(3t) \ge 0\),最小速率为 \(v_{\min} = \sqrt{81} = 9\)(当 \(\sin(3t) = 0\) 时),最大速率为 \(v_{\max} = \sqrt{81 + 63} = \sqrt{144} = 12\)(当 \(|\sin(3t)| = 1\) 时)。
加速与减速:微妙的区别
物体在速率增大时是加速的,在速率减小时是减速的。这一判断需要仔细分析。
一维中的陷阱
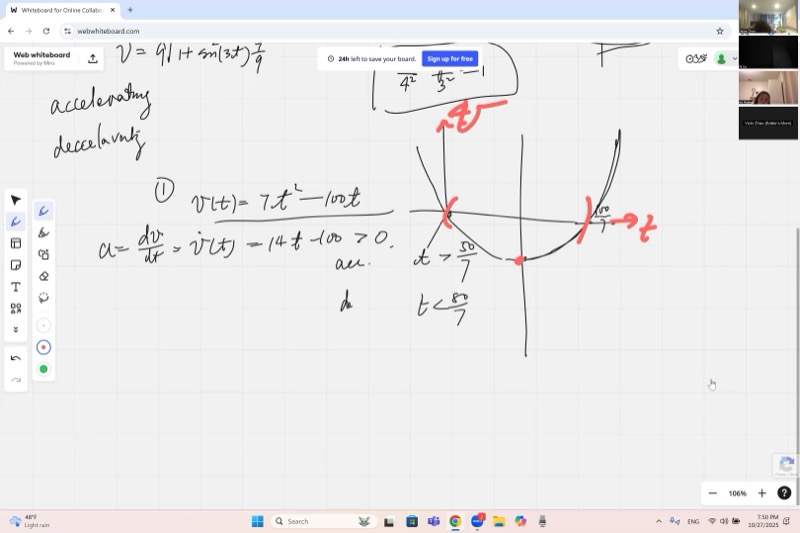
考虑一维速度 \(v(t) = 7t^2 - 100t\)。加速度为:
\[a(t) = \frac{dv}{dt} = 14t - 100\]
令 \(a > 0\) 得 \(t > \frac{50}{7}\)。但正加速度并不总是意味着物体在加速。
速度 \(v(t)\) 是一条抛物线,在 \(t = 0\) 和 \(t = \frac{100}{7}\) 处为零。在这两个零点之间,速度是负的(向左移动)。即使加速度在 \(t = \frac{50}{7}\) 时变为正值,此时物体仍在向左移动并在减速。
正确的规则是:看速率 \(|v(t)|\),而不是速度。
- 当 \(v\) 和 \(a\) 同号时:物体加速
- 当 \(v\) 和 \(a\) 异号时:物体减速
当速度和加速度指向同一方向时,物体加速;当它们指向相反方向时,物体减速。二者乘积的符号即可判定属于哪种情况。
\[\boxed{\text{加速:} \quad a(t) \cdot v(t) > 0 \qquad\qquad \text{减速:} \quad a(t) \cdot v(t) < 0}\]
探索——观察 \(v(t) = 7t^2 - 100t\) 的速率与速度的区别:
蓝色曲线是速度 \(v(t)\)。红色虚线曲线是速率 \(|v(t)|\)。速率从 \(t=0\) 到 \(t=\frac{50}{7}\) 增大(加速),然后从 \(t=\frac{50}{7}\) 到 \(t = \frac{100}{7}\) 减小(减速)——可以观察到,加速度 \(a(t)\) 变号的时刻与速率极值的时刻并不相同。
动画演示:椭圆上的速率(标量)与速度(向量)对比
Speed (scalar) vs. Velocity (vector) on the Ellipse
二维速率的图形分析(避免求导)
对于上述椭圆,已得到 \(v(t) = \sqrt{81 + 63\sin^2(3t)}\)。要确定速率何时增大或减小,不需要对这个表达式求导。
技巧:速率 \(v\) 在 \(\sin^2(3t)\) 增大时增大,而这发生在 \(|\sin(3t)|\) 增大时。所以我们只需画出 \(|\sin(3t)|\) 的图形,读出它在哪里上升或下降即可。
灰色虚线是 \(\sin(3t)\)。蓝色曲线是 \(|\sin(3t)|\)——通过将负值部分”翻转”到正值方向得到。注意函数在零点处有尖角。速率在蓝色曲线上升的地方增大。
从图形中,\(|\sin(3t)|\) 在 \(3t\) 从 \(k\pi\) 到 \(k\pi + \frac{\pi}{2}\) 的区间上递增:
\[\text{加速区间:} t \in \left[\frac{k\pi}{3},\;\; \frac{k\pi}{3} + \frac{\pi}{6}\right] \quad \text{对任意整数 } k\]
\[\text{减速区间:} t \in \left[\frac{k\pi}{3} + \frac{\pi}{6},\;\; \frac{(k+1)\pi}{3}\right] \quad \text{对任意整数 } k\]
简化复杂的速率表达式
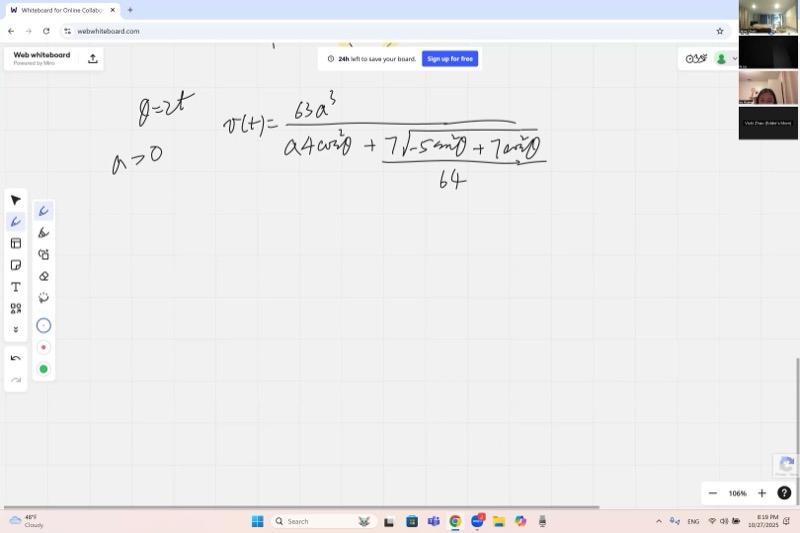
图形方法即使对令人生畏的公式也有效。假设:
\[v(t) = \frac{63a^3}{4\cos^2\theta + 7\sqrt{\frac{12\cos^2\theta + 7\sin^2\theta}{64}}}\]
其中 \(\theta = 2t\),\(a\) 是正常数。我们不求导,而是进行推理:
- 分母的两项都是正的,所以要让 \(v\) 增大,我们需要分母减小。
- 用 \(\sin^2\theta = 1 - \cos^2\theta\) 将一切用 \(u = \cos^2\theta\) 表示。
- 分母的两项都是 \(u\) 的递增函数,所以当 \(u\) 减小时它们减小,即当 \(|\cos\theta|\) 减小时。
- 画出 \(|\cos\theta|\) 的图形,读出它递减的区间——那些就是物体加速的区间。
这种方法完全避免了繁琐的链式法则运算。
一维运动中的转折点
转折点是一维物体改变运动方向的位置。它需要满足两个条件:
\[\dot{x}(t_0) = 0 \qquad \text{且} \qquad \dot{x}(t) \text{ 在 } t_0 \text{ 处变号}\]
仅有 \(\dot{x} = 0\) 是不够的——速度必须从正变负(物体原来向右移动,现在转向左移动)或反过来。这就像位置 \(x(t)\) 的局部最大值或最小值。
在二维运动中,转折点没有唯一严格的定义。一个点是否算作”转折”取决于所分析的坐标方向。例如,在椭圆上,顶部和底部可以是 \(y\) 坐标的转折点,而左右两端是 \(x\) 坐标的转折点。
作业:椭圆上的最大和最小距离
对于椭圆 \(\frac{x^2}{16} + \frac{y^2}{9} = 1\),使用微分学(优化方法)求距中心最大和最小距离的点。
提示:在椭圆约束下最大化和最小化 \(r^2 = x^2 + y^2\)。可以代入 \(y^2 = 9\left(1 - \frac{x^2}{16}\right)\) 并对 \(x\) 进行优化。
直觉上,最远的点在 \((\pm 4, 0)\),最近的点在 \((0, \pm 3)\)——请给出严格证明。
速查表
| 目标 | 公式 |
|---|---|
| 位置向量 | \(\vec{r}(t) = (x(t),\, y(t))\) |
| 速度向量 | \(\vec{v}(t) = (\dot{x}(t),\, \dot{y}(t)) = \frac{d\vec{r}}{dt}\) |
| 速率 | \(v = \lvert\vec{v}\rvert = \sqrt{\dot{x}^2 + \dot{y}^2}\) |
| 消去参数(三角函数) | 使用 \(\cos^2\theta + \sin^2\theta = 1\) 消去 \(t\) |
| 参数化椭圆 | \(x = a\cos\omega t,\; y = b\sin\omega t \;\Rightarrow\; \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\) |
| 起点 | 将 \(t = 0\) 代入 \(x(t)\) 和 \(y(t)\) |
| 运动方向 | 检查小正 \(t\) 时 \(\dot{x}\) 和 \(\dot{y}\) 的符号 |
| 加速(一维) | \(a(t) \cdot v(t) > 0\)(同号) |
| 减速(一维) | \(a(t) \cdot v(t) < 0\)(异号) |
| 加速(二维) | 速率 \(\lvert\vec{v}\rvert\) 在增大 |
| 转折点(一维) | \(v(t_0) = 0\) 且 \(v\) 变号 |
核心思路链
\[\vec{r}(t) \;\xrightarrow{\;\frac{d}{dt}\;}\; \vec{v}(t) \;\xrightarrow{\;|\cdot|\;}\; v(t) = \text{速率} \;\xrightarrow{\;\text{在增大?}\;}\; \text{加速}\]
\[\text{参数方程:} x(t),\, y(t) \;\xrightarrow{\;\text{消去 } t\;}\; F(x, y) = 0 \;\text{(轨迹)}\]