Motion in 2D: Velocity, Speed, Trajectories & Acceleration
Describing motion in two dimensions requires equations that track the \(x\)- and \(y\)-coordinates separately as functions of time. This lesson develops the methods for determining an object’s speed and direction from its position vector, eliminating the time parameter to identify the geometric shape of the trajectory, and distinguishing intervals of acceleration from intervals of deceleration – techniques fundamental to the analysis of motion in physics and engineering.
Understanding how objects move through space is foundational to physics and engineering. Two-dimensional motion arises in numerous contexts:
- Computer graphics and animation: every character, projectile, and camera path is described by parametric equations giving position as a function of time
- Orbital mechanics: satellite orbits (ellipses) are computed from parametric equations, and thrust timing depends on velocity analysis
- Sports science: tracking a ball’s curved path or a runner on a track requires decomposing velocity into components
- Autonomous navigation: self-driving vehicles must determine both speed (magnitude) and heading (velocity vector) to navigate safely
- Meteorology: hurricanes and wind patterns are described by velocity fields in 2D and 3D, and forecasters must determine when storms are accelerating
This lesson covers describing motion with vectors, eliminating time to identify trajectory shapes, and determining when an object is speeding up or slowing down.
Topics Covered
- Position vector \(\vec{r}(t) = (x(t),\, y(t),\, z(t))\) and time evolution
- Velocity vector \(\vec{v}(t) = \frac{d\vec{r}}{dt} = (\dot{x},\, \dot{y},\, \dot{z})\)
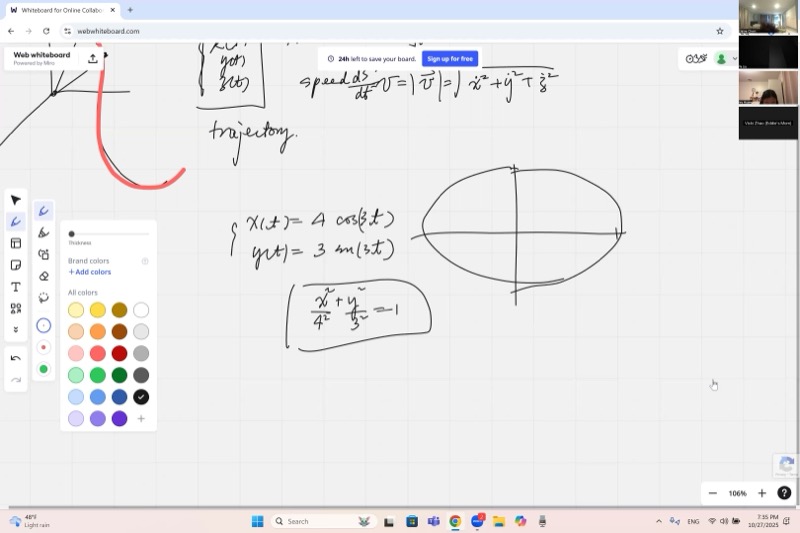
- Speed as magnitude of velocity: \(v = |\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2 + \dot{z}^2}\)
- Eliminating the parameter \(t\) to find the trajectory equation
- Identifying elliptical orbits from parametric equations using the Pythagorean identity
- Determining starting point and direction of motion on a trajectory
- Accelerating vs. decelerating: when \(a(t) \cdot v(t) > 0\) vs. \(a(t) \cdot v(t) < 0\)
- Graphical analysis of speed without taking messy derivatives
- Turning points in 1D motion: where \(v(t) = 0\) and velocity changes sign
Lecture Video
Key Frames from the Lecture
Prerequisites
A vector is a quantity that has both magnitude (size) and direction. We write vectors with arrows: \(\vec{v}\).
In 2D, a vector has two components: \(\vec{v} = (v_x,\, v_y)\). In 3D, it has three: \(\vec{v} = (v_x,\, v_y,\, v_z)\).
The magnitude (length) of a vector uses the Pythagorean theorem:
\[|\vec{v}| = \sqrt{v_x^2 + v_y^2} \quad \text{(2D)} \qquad |\vec{v}| = \sqrt{v_x^2 + v_y^2 + v_z^2} \quad \text{(3D)}\]
For example, if \(\vec{v} = (3, 4)\), then \(|\vec{v}| = \sqrt{9 + 16} = 5\).
Parametric equations describe a curve by giving each coordinate as a separate function of a parameter (usually time \(t\)):
\[x = f(t), \qquad y = g(t)\]
Instead of writing \(y\) directly as a function of \(x\), we let both \(x\) and \(y\) depend on \(t\). As \(t\) changes, the point \((x, y)\) traces out a curve called the trajectory.
For example, \(x = \cos t\), \(y = \sin t\) traces a unit circle as \(t\) goes from \(0\) to \(2\pi\).
The most important trig identity is:
\[\cos^2\theta + \sin^2\theta = 1\]
This comes directly from the unit circle: any point \((\cos\theta, \sin\theta)\) lies on the circle \(x^2 + y^2 = 1\).
This identity is used frequently to eliminate the parameter \(t\) from parametric equations involving sine and cosine.
An ellipse is a stretched circle. Its standard equation is:
\[\frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\]
where \(a\) is the semi-major axis (half the width) and \(b\) is the semi-minor axis (half the height), or vice versa. When \(a = b\), the ellipse becomes a circle.
A parametric form of the ellipse is \(x = a\cos\theta\), \(y = b\sin\theta\).
Key Concepts
Position, Velocity, and Speed in 2D and 3D
An object moving through space has a position vector that changes with time:
\[\vec{r}(t) = \big(x(t),\; y(t),\; z(t)\big)\]
The velocity vector is the derivative of position with respect to time:
\[\vec{v}(t) = \frac{d\vec{r}}{dt} = \big(\dot{x}(t),\; \dot{y}(t),\; \dot{z}(t)\big)\]
Here the dot notation \(\dot{x}\) means \(\frac{dx}{dt}\). Velocity specifies both the rate and direction of motion. It is a vector – it points along the tangent to the trajectory.
The speed is the magnitude of velocity – it tells us only how fast, with no direction:
\[v = |\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2 + \dot{z}^2}\]
Speed can also be written as \(\frac{ds}{dt}\), where \(ds\) is an infinitesimal arc length along the trajectory.
Eliminating the Parameter: Finding the Trajectory
Given parametric equations, we often want the trajectory – the curve in space without any reference to time. We do this by eliminating \(t\).
Example: Suppose \(x(t) = 4\cos(3t)\) and \(y(t) = 3\sin(3t)\).
Step 1 – Isolate the trig functions:
\[\frac{x}{4} = \cos(3t), \qquad \frac{y}{3} = \sin(3t)\]
Step 2 – Apply the Pythagorean identity \(\cos^2\theta + \sin^2\theta = 1\):
\[\left(\frac{x}{4}\right)^2 + \left(\frac{y}{3}\right)^2 = \cos^2(3t) + \sin^2(3t) = 1\]
By using the Pythagorean identity \(\cos^2\theta + \sin^2\theta = 1\), you can remove time from parametric equations and discover the geometric shape of the path. Here, the parametric circle/ellipse equations combine into one clean equation.
\[\boxed{\frac{x^2}{16} + \frac{y^2}{9} = 1}\]
This is an ellipse with semi-major axis \(a = 4\) (along \(x\)) and semi-minor axis \(b = 3\) (along \(y\)).
Interactive demonstration – the elliptical trajectory traced out over time:
Drag the slider for \(t_{\max}\) to observe the particle tracing out the ellipse. It starts at \((4, 0)\) and moves counterclockwise.
Interactive: 2D Trajectory with Velocity Vector
Particle Tracing an Elliptical Path with Velocity Arrow
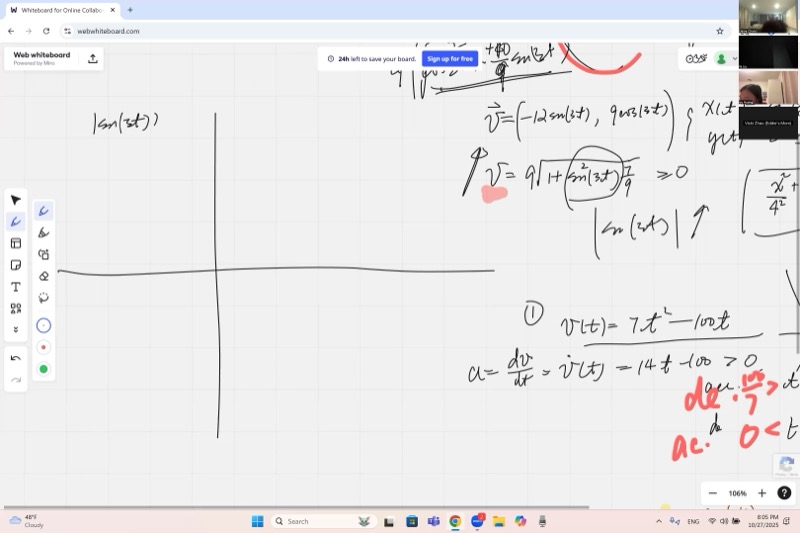
Press Play to watch the green particle trace the ellipse counterclockwise from \((4,0)\). The red arrow shows the velocity vector \(\vec{v}(t) = (-12\sin 3t,\; 9\cos 3t)\), always tangent to the curve. Use the speed slider to control animation rate.
Starting Point and Direction of Motion
The trajectory equation \(\frac{x^2}{16} + \frac{y^2}{9} = 1\) tells us the shape but not where the motion starts or which way it goes. To recover that, we go back to the parametric equations.
Starting point: Plug in \(t = 0\):
\[x(0) = 4\cos(0) = 4, \qquad y(0) = 3\sin(0) = 0\]
So the motion starts at \((4, 0)\), the rightmost point of the ellipse.
Direction: For a small positive \(t\), \(\cos(3t)\) decreases slightly from 1 while \(\sin(3t)\) increases from 0. So \(x\) decreases and \(y\) increases – the particle moves up and to the left, i.e., counterclockwise.
Computing Velocity and Speed for the Ellipse
Taking derivatives of \(x(t) = 4\cos(3t)\) and \(y(t) = 3\sin(3t)\):
\[\vec{v}(t) = \big(-12\sin(3t),\;\; 9\cos(3t)\big)\]
The speed is:
\[v = \sqrt{(-12\sin 3t)^2 + (9\cos 3t)^2} = \sqrt{144\sin^2(3t) + 81\cos^2(3t)}\]
We simplify by splitting \(144 = 81 + 63\):
\[v = \sqrt{81\sin^2(3t) + 63\sin^2(3t) + 81\cos^2(3t)}\]
\[= \sqrt{81\underbrace{(\sin^2 3t + \cos^2 3t)}_{= 1} + 63\sin^2(3t)}\]
\[\boxed{v(t) = \sqrt{81 + 63\sin^2(3t)}}\]
Since \(\sin^2(3t) \ge 0\), the minimum speed is \(v_{\min} = \sqrt{81} = 9\) (when \(\sin(3t) = 0\)), and the maximum speed is \(v_{\max} = \sqrt{81 + 63} = \sqrt{144} = 12\) (when \(|\sin(3t)| = 1\)).
Accelerating vs. Decelerating: The Subtle Distinction
An object is accelerating when its speed is increasing, and decelerating when its speed is decreasing. This distinction requires careful analysis.
The 1D Trap
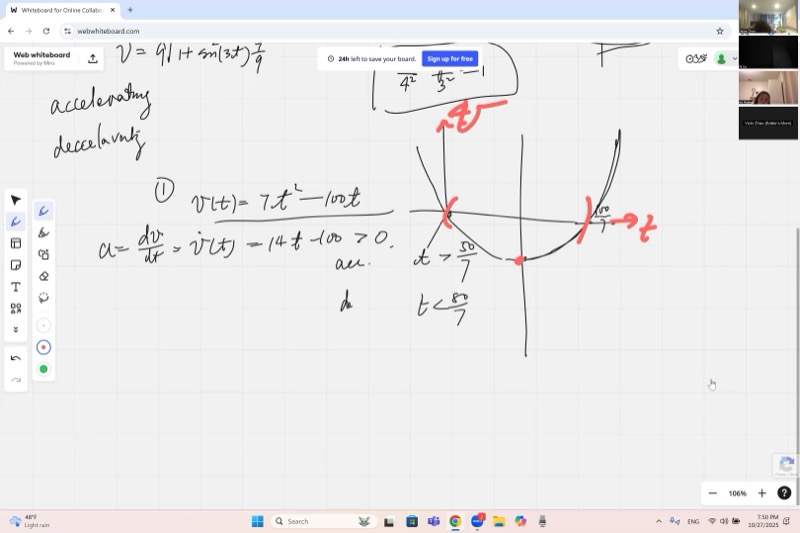
Consider the 1D velocity \(v(t) = 7t^2 - 100t\). The acceleration is:
\[a(t) = \frac{dv}{dt} = 14t - 100\]
Setting \(a > 0\) gives \(t > \frac{50}{7}\). However, positive acceleration does not always mean the object is speeding up.
The velocity \(v(t)\) is a parabola with roots at \(t = 0\) and \(t = \frac{100}{7}\). Between these roots the velocity is negative (moving left). Even though the acceleration becomes positive at \(t = \frac{50}{7}\), the object is still moving left and getting slower at that moment.
The correct rule: look at the speed \(|v(t)|\), not the velocity.
- When \(v\) and \(a\) have the same sign: the object speeds up (accelerating)
- When \(v\) and \(a\) have opposite signs: the object slows down (decelerating)
An object speeds up when its velocity and acceleration point the same way, and slows down when they point in opposite directions. The sign of their product tells you which case you are in.
\[\boxed{\text{Accelerating:} \quad a(t) \cdot v(t) > 0 \qquad\qquad \text{Decelerating:} \quad a(t) \cdot v(t) < 0}\]
Interactive demonstration – speed versus velocity for \(v(t) = 7t^2 - 100t\):
The blue curve is velocity \(v(t)\). The red dashed curve is speed \(|v(t)|\). The speed increases from \(t=0\) to \(t=\frac{50}{7}\) (accelerating), then decreases from \(t=\frac{50}{7}\) to \(t = \frac{100}{7}\) (decelerating) – even though the acceleration \(a(t)\) changes sign at \(t = \frac{50}{7}\), not at the same points!
Interactive: Speed vs. Velocity Comparison
Speed (scalar) vs. Velocity (vector) on the Ellipse
The top panel shows the velocity components \(v_x(t)\) (red) and \(v_y(t)\) (blue) – these are signed vector quantities that oscillate. The bottom panel shows speed \(|\vec{v}|\) (green), which is always positive and oscillates between 9 and 12. Press Play to see the scan line sweep through time.
Graphical Analysis of Speed in 2D (Avoiding Derivatives)
For our ellipse, we found \(v(t) = \sqrt{81 + 63\sin^2(3t)}\). To determine when the speed increases or decreases, we do not need to differentiate this complicated expression!
The key observation: the speed \(v\) increases when \(\sin^2(3t)\) increases, which occurs when \(|\sin(3t)|\) increases. It therefore suffices to graph \(|\sin(3t)|\) and identify where it is increasing or decreasing.
The gray dashed curve is \(\sin(3t)\). The blue curve is \(|\sin(3t)|\) – obtained by “flipping” the negative parts upward. Notice the sharp cusps where the function hits zero. The speed is increasing wherever the blue curve is rising.
From the graph, \(|\sin(3t)|\) increases on intervals where \(3t\) goes from \(k\pi\) to \(k\pi + \frac{\pi}{2}\):
\[\text{Accelerating: } t \in \left[\frac{k\pi}{3},\;\; \frac{k\pi}{3} + \frac{\pi}{6}\right] \quad \text{for any integer } k\]
\[\text{Decelerating: } t \in \left[\frac{k\pi}{3} + \frac{\pi}{6},\;\; \frac{(k+1)\pi}{3}\right] \quad \text{for any integer } k\]
Simplifying Complex Speed Expressions
The graphical method works even for intimidating formulas. Suppose:
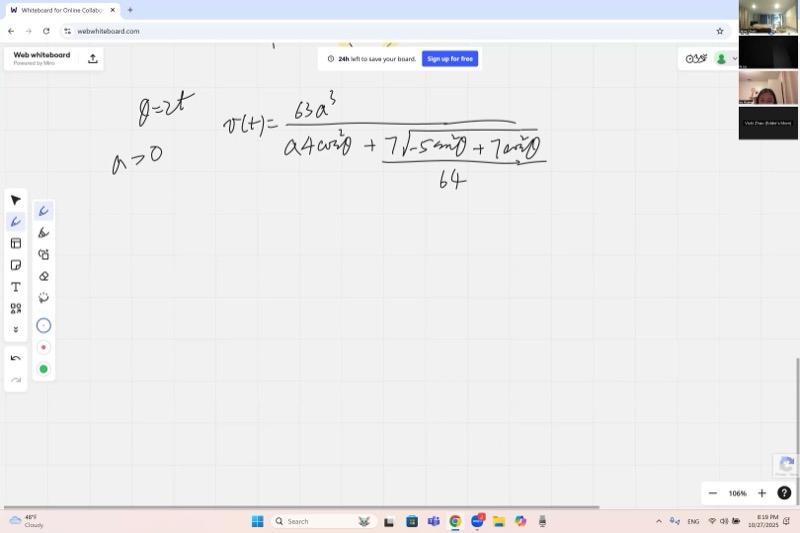
\[v(t) = \frac{63a^3}{4\cos^2\theta + 7\sqrt{\frac{12\cos^2\theta + 7\sin^2\theta}{64}}}\]
where \(\theta = 2t\) and \(a\) is a positive constant. Instead of differentiating, we reason:
- Both terms in the denominator are positive, so to make \(v\) increase, we need the denominator to decrease.
- Use \(\sin^2\theta = 1 - \cos^2\theta\) to rewrite everything in terms of \(u = \cos^2\theta\).
- Both denominator terms are increasing functions of \(u\), so they decrease when \(u\) decreases, i.e., when \(|\cos\theta|\) decreases.
- Graph \(|\cos\theta|\) and read off where it is decreasing – those are the intervals where the object accelerates.
This approach entirely avoids the difficulties of explicit differentiation.
Turning Points in 1D Motion
A turning point is where a 1D object reverses direction. It requires two conditions:
\[\dot{x}(t_0) = 0 \qquad \text{and} \qquad \dot{x}(t) \text{ changes sign at } t_0\]
The condition \(\dot{x} = 0\) alone is not sufficient – the velocity must change sign (from positive to negative, or conversely). This corresponds to a local maximum or minimum of the position \(x(t)\).
In 2D motion, there is no single rigorous definition of a turning point. Whether a point counts as a “turn” depends on which coordinate direction you are analyzing. On the ellipse, for example, the top and bottom could be turning points for the \(y\)-coordinate, while the left and right extremes are turning points for the \(x\)-coordinate.
Homework: Maximum and Minimum Distance on the Ellipse
For the ellipse \(\frac{x^2}{16} + \frac{y^2}{9} = 1\), find the point(s) at maximum and minimum distance from the center using differential calculus (optimization).
Hint: Maximize and minimize \(r^2 = x^2 + y^2\) subject to the ellipse constraint. One may substitute \(y^2 = 9\left(1 - \frac{x^2}{16}\right)\) and optimize over \(x\).
Intuition suggests the farthest points are \((\pm 4, 0)\) and the closest are \((0, \pm 3)\) – this should be proved rigorously.
Cheat Sheet
| What you want | Formula |
|---|---|
| Position vector | \(\vec{r}(t) = (x(t),\, y(t))\) |
| Velocity vector | \(\vec{v}(t) = (\dot{x}(t),\, \dot{y}(t)) = \frac{d\vec{r}}{dt}\) |
| Speed | \(v = \lvert\vec{v}\rvert = \sqrt{\dot{x}^2 + \dot{y}^2}\) |
| Eliminate parameter (trig) | Use \(\cos^2\theta + \sin^2\theta = 1\) to remove \(t\) |
| Ellipse from parametric | \(x = a\cos\omega t,\; y = b\sin\omega t \;\Rightarrow\; \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\) |
| Starting point | Plug \(t = 0\) into \(x(t)\) and \(y(t)\) |
| Direction of motion | Check sign of \(\dot{x}\) and \(\dot{y}\) for small \(t > 0\) |
| Accelerating (1D) | \(a(t) \cdot v(t) > 0\) (same sign) |
| Decelerating (1D) | \(a(t) \cdot v(t) < 0\) (opposite signs) |
| Accelerating (2D) | Speed \(\lvert\vec{v}\rvert\) is increasing |
| Turning point (1D) | \(v(t_0) = 0\) and \(v\) changes sign |
The Big Chain of Ideas
\[\vec{r}(t) \;\xrightarrow{\;\frac{d}{dt}\;}\; \vec{v}(t) \;\xrightarrow{\;|\cdot|\;}\; v(t) = \text{speed} \;\xrightarrow{\;\text{increasing?}\;}\; \text{accelerating}\]
\[\text{Parametric: } x(t),\, y(t) \;\xrightarrow{\;\text{eliminate } t\;}\; F(x, y) = 0 \;\text{ (trajectory)}\]