Parametric Motion, Speed vs. Velocity & Proving the Circumference
The formula \(C = 2\pi r\) for the circumference of a circle is familiar from elementary geometry, but a rigorous derivation requires calculus. This lesson uses parametric equations to describe circular motion, computes the speed using derivatives, and then proves the circumference formula. We also develop the technique of recovering an object’s position from its velocity via antidifferentiation.
Parametric equations describe how objects move through space over time:
- Navigation systems: GPS devices track position as separate \(x(t)\) and \(y(t)\) coordinates to plot routes on a map
- Computer graphics: characters and projectiles on screen move according to parametric equations that update each frame
- Meteorology: hurricane paths are modeled as parametric curves, with speed and direction computed at each moment
- Robotics: a robot arm traces a path through space, and engineers must determine both the speed and direction of each joint
- Mechanical design: parametric curves are used to ensure that moving parts follow trajectories producing acceptable forces
Topics Covered
- Parametric equations for circular motion: \(x(t) = r\cos(2t)\), \(y(t) = r\sin(2t)\)
- Velocity as the derivative of position: \(\vec{v} = \left(\frac{dx}{dt},\, \frac{dy}{dt}\right)\)
- Speed as the magnitude of velocity: \(|\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2}\)
- Proving the circumference of a circle: \(C = 2\pi r\)
- Distance traveled vs. displacement
- Recovering position from velocity via anti-differentiation
- Connection to the Fundamental Theorem of Calculus
Lecture Video
Key Frames from the Lecture
Prerequisites
Instead of writing \(y\) as a function of \(x\), we describe a curve by giving both coordinates as functions of a third variable, usually time \(t\):
\[x = f(t), \quad y = g(t)\]
As \(t\) changes, the point \((x, y)\) traces out a path called a parametric curve or trajectory.
For example, \(x = \cos t\), \(y = \sin t\) traces the unit circle as \(t\) goes from \(0\) to \(2\pi\).
- Velocity is a vector – it has both magnitude and direction. In 2D, \(\vec{v} = (v_x, v_y)\).
- Speed is a scalar – it is the magnitude of velocity: \(|\vec{v}| = \sqrt{v_x^2 + v_y^2}\).
A car traveling at 60 mph north has a velocity of 60 mph north and a speed of 60 mph. If it reverses direction and travels south at 60 mph, the velocity has changed (different direction) but the speed remains the same.
For a composition of functions, the chain rule provides the derivative:
\[\frac{d}{dt}\, f\!\bigl(g(t)\bigr) = f'\!\bigl(g(t)\bigr) \cdot g'(t)\]
For example: \(\frac{d}{dt}\cos(2t) = -\sin(2t) \cdot 2 = -2\sin(2t)\).
One differentiates the outer function, then multiplies by the derivative of the inner function.
- Displacement is the straight-line vector from start to finish. Walking 3 blocks east then 3 blocks west yields a displacement of zero.
- Distance traveled is the total length of the path actually traversed. In the example above, the distance is 6 blocks.
Distance is always greater than or equal to the magnitude of displacement.
An anti-derivative (or indefinite integral) reverses differentiation. If \(\frac{d}{dt} F(t) = f(t)\), then \(F(t)\) is an anti-derivative of \(f(t)\).
For example, since \(\frac{d}{dt}\left(\frac{3}{2}t^2\right) = 3t\), the anti-derivative of \(3t\) is \(\frac{3}{2}t^2 + C\), where \(C\) is an arbitrary constant.
From a Circle to Motion: Parametric Equations
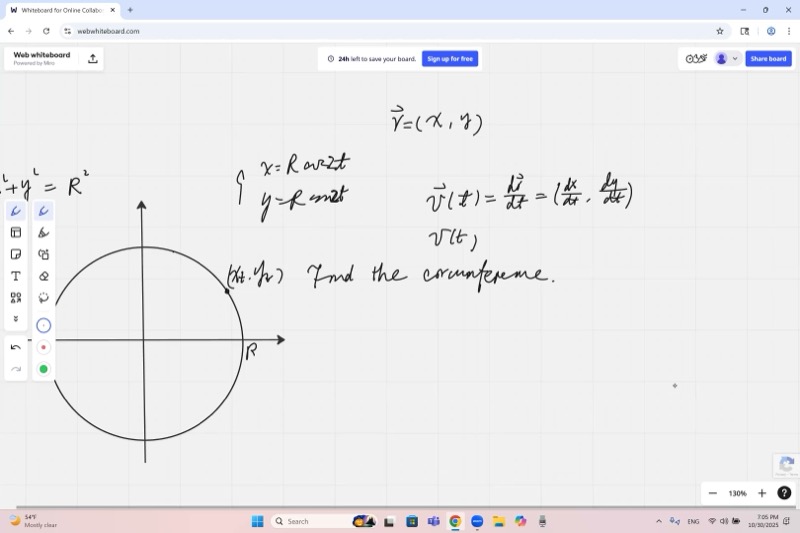
The equation of a circle centered at the origin with radius \(r\) is:
\[x^2 + y^2 = r^2\]
This is a static shape – an orbit. To describe motion along this curve, we introduce time as a parameter. Using the definitions of cosine and sine on a circle of radius \(r\):
\[x(t) = r\cos(2t), \quad y(t) = r\sin(2t)\]
The factor of \(2\) inside the argument controls how fast the point moves around the circle. Different choices would give different speeds but trace the same path.
Interactive demonstration – the parametric circle:
Interactive: Parametric Circle with Tangent Velocity Vector
Point on Circle with Velocity Vector (speed = 2r)
The blue dot moves around the circle of radius \(r\). The green dashed line is the radius, and the red arrow is the velocity vector – always tangent (perpendicular to the radius). The speed \(|\vec{v}| = 2r\) stays constant as the particle moves. Change \(r\) to see how the speed scales linearly with the radius.
Finding the Velocity Vector
Velocity is the rate of change of position. We differentiate each coordinate separately:
\[\vec{v}(t) = \left(\frac{dx}{dt},\; \frac{dy}{dt}\right)\]
Applying the chain rule to each component:
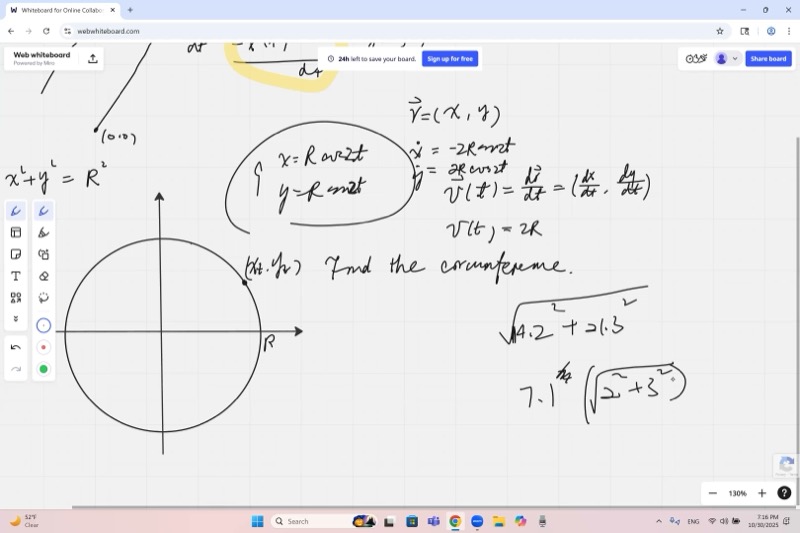
\[\frac{dx}{dt} = \frac{d}{dt}\bigl[r\cos(2t)\bigr] = -r\sin(2t) \cdot 2 = -2r\sin(2t)\]
\[\frac{dy}{dt} = \frac{d}{dt}\bigl[r\sin(2t)\bigr] = r\cos(2t) \cdot 2 = 2r\cos(2t)\]
So the velocity vector is:
\[\vec{v}(t) = \bigl(-2r\sin(2t),\; 2r\cos(2t)\bigr)\]
Notice that the velocity is always tangent to the circle – it points in the direction of motion, perpendicular to the radius.
Speed: The Magnitude of Velocity
Speed is the magnitude of the velocity vector:
\[|\vec{v}| = \sqrt{\dot{x}^2 + \dot{y}^2} = \sqrt{(-2r\sin 2t)^2 + (2r\cos 2t)^2}\]
Factoring out common terms first simplifies the Pythagorean sum:
\[= \sqrt{(2r)^2\bigl(\sin^2(2t) + \cos^2(2t)\bigr)}\]
Since \(\sin^2\theta + \cos^2\theta = 1\) for any angle \(\theta\):
When a point travels around a circle, the sine and cosine terms in its velocity cancel out thanks to the Pythagorean identity, leaving a speed that never changes. The speed depends only on the radius and how fast the angle is changing.
\[|\vec{v}| = 2r\]
The speed is constant – the point moves around the circle at the same rate at all times. This is uniform circular motion.
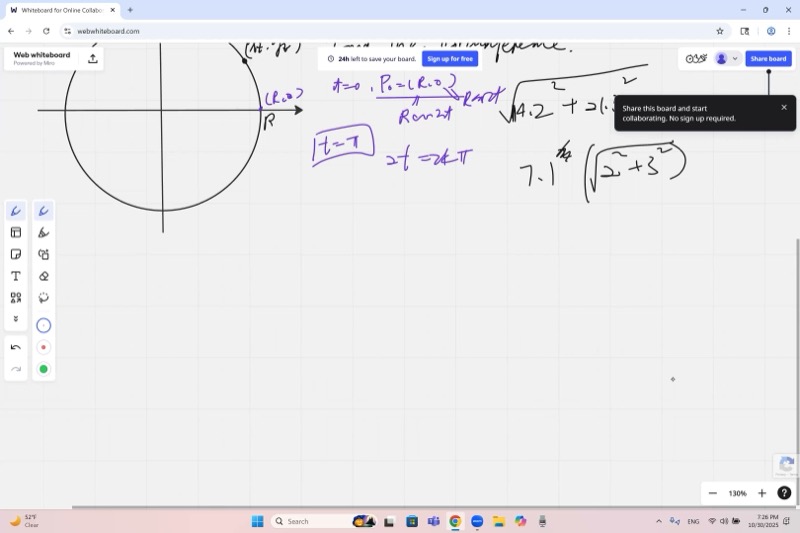
Finding the Period
At \(t = 0\), the point starts at:
\[P_0 = \bigl(r\cos(0),\, r\sin(0)\bigr) = (r,\, 0)\]
To complete one full revolution, the angle \(2t\) must increase by \(2\pi\) (the radian measure of a full turn):
\[2t = 2\pi \implies t = \pi\]
So the period – the time for one complete circle – is \(T = \pi\).
Time cannot equal a number of degrees. The equation \(2t = 2\pi\) is valid because \(2\pi\) is a dimensionless number (radians are unitless). Writing \(t = 180°\) would constitute a unit mismatch. This is one of the fundamental reasons calculus employs radians.
Proving the Circumference: \(C = 2\pi r\)
Since the speed \(|\vec{v}| = 2r\) is constant and the period is \(T = \pi\), the total distance traveled in one revolution is:
Distance equals speed times time. Since the speed around the circle is constant at \(2r\) and one full trip takes time \(\pi\), the total distance – the circumference – is simply their product.
\[C = \int_0^{\pi} |\vec{v}|\, dt = \int_0^{\pi} 2r\, dt = 2r \cdot \pi = 2\pi r\]
This is the familiar formula for circumference, but now it has been proved from calculus rather than stated as a fact.
Observe that traveling at a constant speed of \(2r\) for a duration of \(\pi\) yields a distance of \(2r \times \pi\). Geometrically, this is the area of the rectangle under the constant velocity graph.
See the velocity graph – the area of the rectangle is the circumference:
Interactive: Arc Length Accumulation
Arc Length Accumulation Along a Parametric Curve
The top panel shows the parametric curve being traced in real time (blue), with the red dot marking the current position. The bottom panel shows the cumulative arc length \(s(t) = \int_0^t |\vec{v}|\,d\tau\) growing as \(t\) increases. Notice how arc length grows faster when the particle moves faster (where the speed is higher).
Distance vs. Displacement in General Motion
The circumference proof highlights an important distinction:
| Quantity | Definition | Formula |
|---|---|---|
| Displacement | Vector from start to finish | \(\Delta\vec{r} = \vec{r}(t_f) - \vec{r}(t_0)\) |
| Distance traveled | Total path length (always positive) | \(s = \int_{t_0}^{t_f} |\vec{v}(t)|\, dt\) |
For the full circle, the displacement is \(\vec{0}\) (you return to the starting point), but the distance traveled is \(2\pi r\).
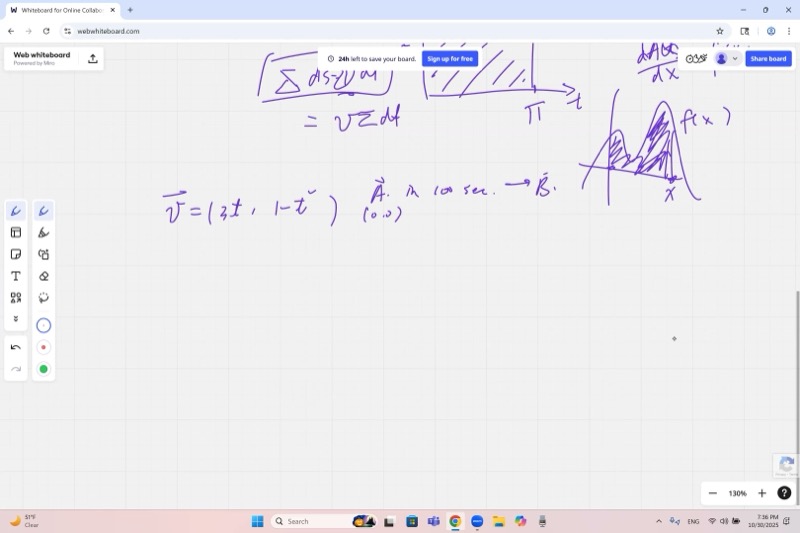
The key formula connecting speed and distance is:
\[ds = |\vec{v}|\, dt \quad \implies \quad s = \int_{t_0}^{t_f} |\vec{v}|\, dt\]
This is the arc length integral – it adds up all the tiny distance elements \(ds\) along the path.
Worked Example: Non-Uniform 2D Motion
Now consider a more general velocity vector that is not constant:
\[\vec{v}(t) = (3t,\; 1 - t^2)\]
Starting from the origin \(A = (0, 0)\), find the position after \(t = 100\) seconds.
Step 1: Find \(x(t)\) by anti-differentiating \(\dot{x} = 3t\)
\[x(t) = \int 3t\, dt = \frac{3}{2}t^2 + C_1\]
Since \(x(0) = 0\), we get \(C_1 = 0\), so \(x(t) = \frac{3}{2}t^2\).
Step 2: Find \(y(t)\) by anti-differentiating \(\dot{y} = 1 - t^2\)
\[y(t) = \int (1 - t^2)\, dt = t - \frac{t^3}{3} + C_2\]
Since \(y(0) = 0\), we get \(C_2 = 0\), so \(y(t) = t - \frac{t^3}{3}\).
Step 3: Evaluate at \(t = 100\)
\[x(100) = \frac{3}{2}(100)^2 = 15{,}000\]
\[y(100) = 100 - \frac{100^3}{3} = 100 - \frac{1{,}000{,}000}{3} \approx -333{,}233\]
The position at \(t = 100\) is \(B \approx (15{,}000,\; -333{,}233)\).
When computing a change in position, the constant cancels:
\[\Delta x = x(t_f) - x(t_0) = \left[\frac{3}{2}t_f^2 + C\right] - \left[\frac{3}{2}t_0^2 + C\right] = \frac{3}{2}(t_f^2 - t_0^2)\]
The constant \(C\) represents an unknown shift of the coordinate system. Since we only care about the change, it cancels. When we set the starting point at the origin, we effectively choose \(C = 0\).
Step 4: Distance traveled (the harder question)
The distance is not the same as the displacement magnitude. We need the arc length integral:
\[s = \int_0^{100} |\vec{v}(t)|\, dt = \int_0^{100} \sqrt{(3t)^2 + (1 - t^2)^2}\, dt = \int_0^{100} \sqrt{9t^2 + 1 - 2t^2 + t^4}\, dt\]
\[= \int_0^{100} \sqrt{t^4 + 7t^2 + 1}\, dt\]
This integral does not simplify to a nice closed form, which is typical for real-world motion. In practice, we would evaluate it numerically.
Interactive demonstration – the trajectory of the particle:
The Fundamental Theorem Connection
The process we used – going from velocity back to position via anti-differentiation – is the Fundamental Theorem of Calculus in action:
\[x(t_f) - x(t_0) = \int_{t_0}^{t_f} \dot{x}(t)\, dt\]
In words: the integral of a rate of change gives the total change. This is the same principle that says the area under a velocity-vs-time graph equals the displacement.
For distance (not displacement), we integrate the speed (the magnitude of velocity):
\[s = \int_{t_0}^{t_f} |\vec{v}(t)|\, dt\]
Cheat Sheet
| Formula | Notes |
|---|---|
| \(x(t) = r\cos(\omega t),\; y(t) = r\sin(\omega t)\) | Parametric circle, radius \(r\), angular speed \(\omega\) |
| \(\vec{v}(t) = \left(\frac{dx}{dt},\, \frac{dy}{dt}\right)\) | Velocity = time derivative of position |
| \(\lvert\vec{v}\rvert = \sqrt{\dot{x}^2 + \dot{y}^2}\) | Speed = magnitude of velocity |
| \(T = \frac{2\pi}{\omega}\) | Period of circular motion |
| \(C = \lvert\vec{v}\rvert \cdot T = 2\pi r\) | Circumference from speed times time |
| \(s = \int_{t_0}^{t_f} \lvert\vec{v}(t)\rvert\, dt\) | Arc length / distance traveled |
| \(\Delta\vec{r} = \int_{t_0}^{t_f} \vec{v}(t)\, dt\) | Displacement from velocity |
Key Identities Used
\[\sin^2\theta + \cos^2\theta = 1\]
\[\frac{d}{dt}\cos(\omega t) = -\omega\sin(\omega t), \qquad \frac{d}{dt}\sin(\omega t) = \omega\cos(\omega t)\]
Anti-Derivative Rules
\[\int t^n\, dt = \frac{t^{n+1}}{n+1} + C \quad (n \neq -1)\]